



To effectively tackle everyday tasks, robots should be able to detect the properties and characteristics of objects in their surroundings, so that they can grasp and manipulate them accordingly. Humans naturally achieve this using their sense of touch and roboticists have thus been trying to provide robots with similar tactile sensing capabilities.
A team of researchers at the University of Hong Kong recently developed a new soft tactile sensor that could allow robots to detect different properties of objects that they are grasping. This sensor, presented in a paper pre-published on arXiv, is made up of two layers of weaved optical fibers and a self-calibration algorithm.
“Although there exist many soft and conformable tactile sensors on robotic applications able to decouple the normal force and shear forces, the impact of the size of object in contact on the force calibration model has been commonly ignored,” Wentao Chen, Youcan Yan, and their colleagues wrote in their paper.
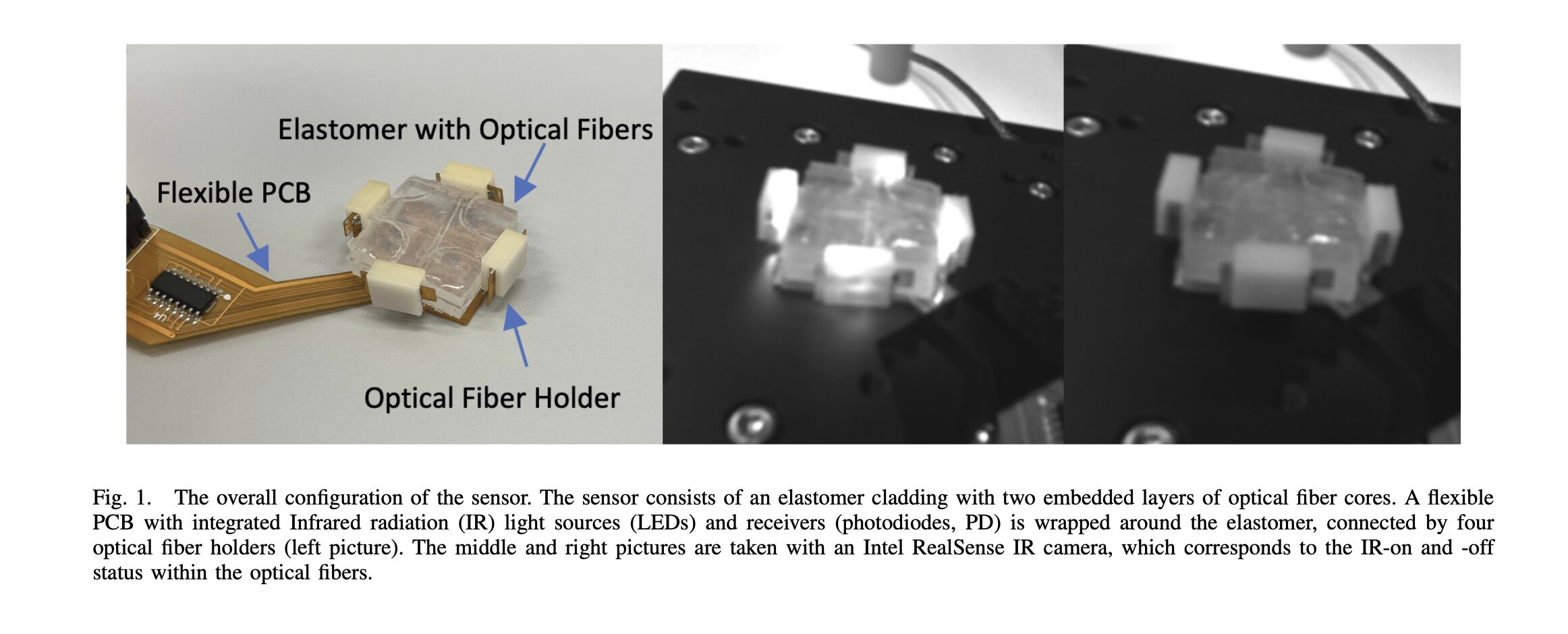
“Using the principle that contact force can be derived from the light power loss in the soft optical fiber core, we present a soft tactile sensor that decouples normal and shear forces and calibrates the measurement results based on the object size, by designing a two-layered weaved polymer-based optical fiber anisotropic structure embedded in a soft elastomer.”
Essentially, the team’s proposed tactile sensor produces an anisotropic response when it is deformed in different directions. This response is then processed by a linear calibration algorithm, which directly maps the signals emitted by the optical fibers to the size of the object in contact with the sensor and the forces calibrated to the object’s size.
Chen, Yan and their colleagues evaluated their sensor in a series of real-world experiments, integrating it at the tip of a robotic arm. In these initial tests, the sensor achieved very promising results, as it could measure the size of objects and their normal and sheer forces calibrated by their size with good accuracy.
“By calibrating the sensor at the robotic arm tip, we show that robots can reconstruct the force vector at an average accuracy of 0.15N for normal forces, 0.17N for shear forces in X-axis , and 0.18N for shear forces in Y-axis, within the sensing range of 0-2N in all directions, and the average accuracy of object size measurement of 0.4mm, within the test indenter diameter range of 5-12mm,” Chen, Yan and their colleagues explained in their paper.
“The results highlight the accurate measurement enabled by the hardware design of the anisotropic two-layered optical fiber structure and flexible PCB and the calibration algorithm.”
In contrast with other artificial tactile systems developed in the past, the researchers’ soft sensor does not rely on data-driven artificial intelligence (AI) models, which can be computationally demanding and often require significant training. This makes it easier to implement on a large-scale, since its fabrication process is also relatively easy and low-cost.
In the future, this new polymer-based sensor could be integrated and tested on a wider range of robots, to further validate its performance in real-world experiments. In addition, the researchers are planning to improve its design further, for instance by including additional optical fiber layers or arranging them differently to decode additional tactile information.
More information:
Wentao Chen et al, Polymer-Based Self-Calibrated Optical Fiber Tactile Sensor, arXiv (2023). DOI: 10.48550/arxiv.2303.00619
© 2023 Science X Network
Citation:
A soft polymer-based tactile sensor for robotics applications (2023, March 17)
retrieved 17 March 2023
from https://techxplore.com/news/2023-03-soft-polymer-based-tactile-sensor-robotics.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.