An approach to achieve compliant robotic manipulation inspired by human adaptive control strategies

Over the past few decades, roboticists have created increasingly advanced and sophisticated robotics systems. While some of these systems are highly efficient and achieved remarkable results, they still perform far poorly than humans on several tasks, including those that involve grasping and manipulating objects.
Researchers from Guangdong University of Technology, Politecnico di Milano, University of Sussex and Bristol Robotics Laboratory (BRL) at University of the West of England have recently developed a model that could help to improve robot manipulation. This model, presented in a paper published in IEEE Transactions on Industrial Informatics, draws inspiration from how humans adapt their manipulation strategies based on the task they are trying to complete.
“Humans have the remarkable ability to deal with physical contact and complete dynamic tasks, such as curving, cutting and assembly, optimally and compliantly,” Professor Chenguang Yang, the corresponding author for the paper working at BRL, told TechXplore. “Although these tasks are easy for humans, they are quite challenging for robots to perform, even advanced ones.”
According to Professor Yang and his colleagues, one of the reasons that many robots struggle with manipulation tasks is that they lack an innate human skill called adaptable compliance. This skill allows humans to adapt their movements and manipulation strategies according to the interactive force with the object they are trying to manipulate.
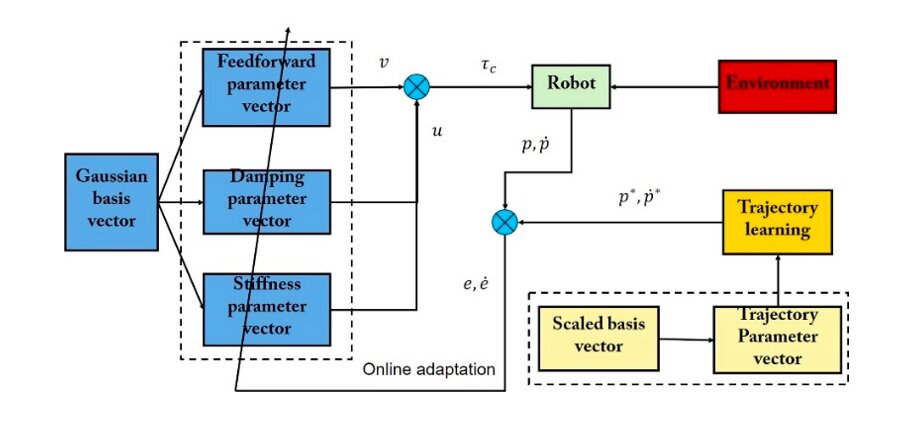
To replicate this capability in robots, the researchers drew inspiration from neuroscience studies, particularly those related to human motor control. In contrast with other approaches developed in the past, their model encodes task-specific parametric movement trajectories, which are associated with dynamic trajectories that include information about impedance and feedforward force profiles.

“Our work focuses on the topic of how to enable robots to learn compliant manipulation skills from humans,” Professor Yang said. “The core goal of our research was to develop learning and control approaches allowing robots to deal with physical interactions and contact-rich tasks in a compliant manner.”
The approach draws inspiration from a control biomimetic model that describes how humans learn to adaptively control their muscle movements to complete manipulation tasks. The new model thus allows robots to simultaneously acquire information about impedance and force as they execute movement trajectories attained from a human demonstration of the task they are learning to complete.
“Our approach enables robots to adapt their compliance dynamically during the execution of a task, thanks to the human motor control mechanism,” Professor Yang said. “Overall, our work shows that biomimetic learning control could be a promising solution to allow robots to learn manipulation skills from humans.”
In the future, the model could help to improve the manipulation skills of both existing and newly developed robots, facilitating their integration in a variety of real-world settings. For instance, it could lead to robots that are better at completing industrial tasks that involve force interactions, such as cutting, drilling and polishing.
“In the future, we will try to improve our approach in several ways, for instance by optimizing the adaptation profiles using optimization techniques, such as reinforcement learning; and utilizing more modalities to make it a multimodal learning and control framework,” Professor Yang added.
A model to predict how much humans and robots can be trusted with completing specific tasks
An approach for robotic learning inspired by biomimetic adaptive control. IEEE Transactions on Industrial Informatics(2021). DOI: 10.1109/TII.2021.3087337.
© 2021 Science X Network
Citation:
An approach to achieve compliant robotic manipulation inspired by human adaptive control strategies (2021, July 1)
retrieved 1 July 2021
from https://techxplore.com/news/2021-06-approach-compliant-robotic-human-strategies.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.