Creating magnetic soft robots using fiber-based processes and unidirectional magnetic fields
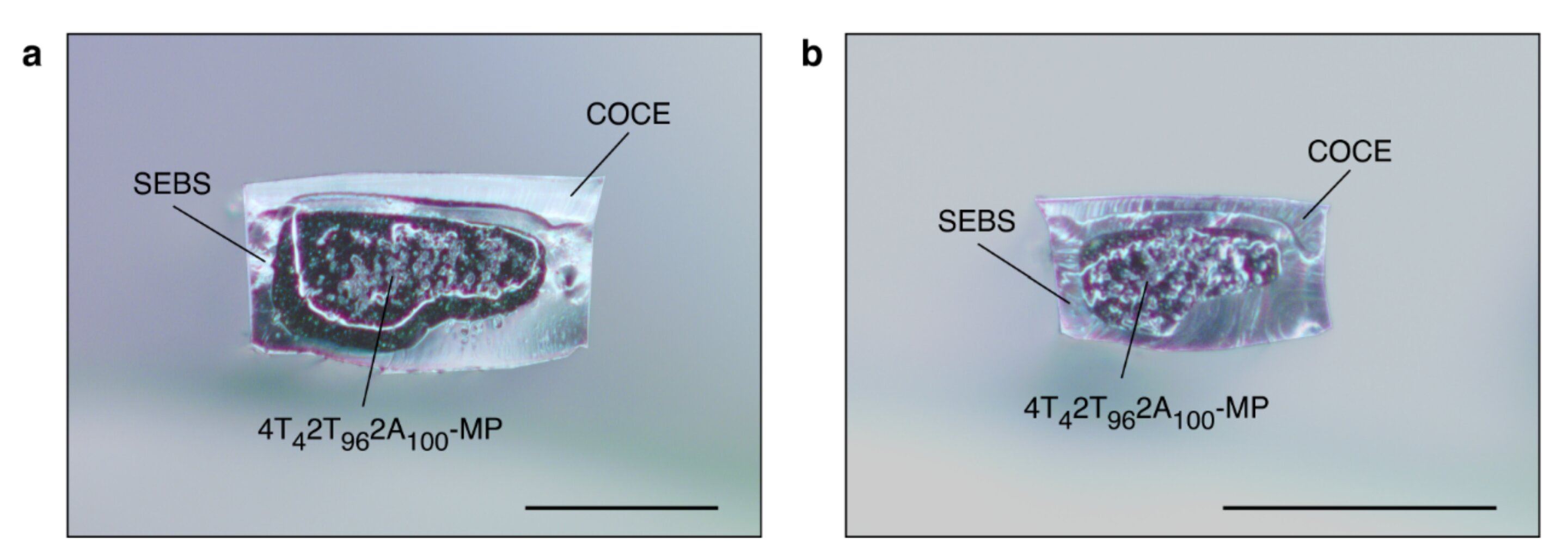
 1000 × 500 µm2 and (b) 500 × 200 µm2. Scale bar = 500 µm. Credit: Advanced Materials (2023). DOI: 10.1002/adma.202301916")
A team of material scientists and electronic engineers at MIT, has developed a way to create magnetic soft robots by combining fiber-based fabrication systems with mechanical and magnetic programming methods to provide locomotion under unidirectional magnetic fields. In their paper published in the journal Advanced Materials, the group describes how they overcame problems faced by others attempting to create magnetically controlled soft robots and outline the design of the robots they created.
As the team at MIT notes, creating soft robots that are controlled using a magnetic field has proven to be a challenging endeavor. In addition to deployment issues, prior teams have run into issues with scaling and production. Because of that, they further note, most such robots are two-dimensional structures, which means they have limited functionality. In this new effort, the group describes how they overcame such challenges to create what they describe as useful 3D magnetically controlled soft robots.
One of the main challenges to using magnets to control soft robots is the bulkiness of the equipment that is needed. To overcome that problem, the research team used fiber-based actuators and magnetic elastomer composites. Furthermore, the actuators were created using thermal drawing (solving the production issue), which allowed for the creation of a stretchy ferromagnetic compound.
Each of the structures were then subjected to a strain regimen that forced them into a helical structure—such structures allowed for folding on-demand (via magnetic pull) at multiple points, in a way that led to constriction and relaxation—similar to the way caterpillars move. Adding folding points allowed for greater flexibility. To mimic bipedal motion, folding points were introduced that forced sectioned structures into linear leg and foot shapes.
The resulting 3D robots could be controlled by varying the strain applied to a given robot and the strength of a magnetic field. The result was worm-like robots, some that crawled and some that walked. The researchers note that locomotion was induced using a magnetic field placed orthogonally to the plane of motion. They also note that the robots could also be programmed in a way that allowed for carrying cargo or for performing in unison with other similar robots.
The research team points out that the design for the robots allows for scalability, and paves the way to use of magnetically controlled soft robots in both biomedical and engineering applications.
More information:
Youngbin Lee et al, Magnetically Actuated Fiber‐Based Soft Robots, Advanced Materials (2023). DOI: 10.1002/adma.202301916
© 2023 Science X Network
Citation:
Creating magnetic soft robots using fiber-based processes and unidirectional magnetic fields (2023, June 9)
retrieved 9 June 2023
from https://techxplore.com/news/2023-06-magnetic-soft-robots-fiber-based-unidirectional.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.